How does GPS work?
- kieronconway
- Jun 16
- 7 min read
Updated: 6 days ago

How does the Global Positioning System (GPS) Work?
Without Einstein's special relativity and general relativity, we would not have a viable GPS system.
The GPS satellites occupy Medium Earth Orbits and each satellite is roughly 20,000 Km above the earth's surface, travelling at about 14,000 Kph.
Each satellite completes one orbit of the earth in just under 12 hours and they operate in a series of six orbital planes, designed so that between 6 to 12 satellites are in view anywhere (almost) on the earth.
Each satellite is constantly broadcasting messages down to earth, which contain;
The identity of the satellite
Information about where it is in its orbit
The time (GPS time) that the message was transmitted
GPS time is used in preference to universal time (UTC) and GPS time, started on 6 January 1980, does not contain leap seconds and differs from UTC by a known offset
It's all a question of time
All the GPS satellites have on-board atomic clocks, which must be compared with the earth-bound clocks in GPS devices for GPS to work accurately.
The clocks in a GPS device use standard, low-cost quartz-clocks and contain errors compared to the accuracy of atomic clocks. So, this time error, represented by 'ΔT', is an additional unknown on top of the unknown location of the GPS device.
The GPS receivers need to calculate the distance to each satellite and they can do this by determining how long the signal from each satellite took to arrive at the receiver.
The GPS receiver subtracts the time the message was sent from the time it was received to produce the time-of-flight of the message from satellite to GPS device.
Using the constant speed of light, the receiver can work out the distance to each satellite in view. This distance, because of the error in the local clock, is referred to as 'pseudo-distance'.
Calculated pseudo-distance to each satellite, together with knowledge of where each satellite is in its orbit, is then used to determine where the receiver is currently located on the planet.
In order to produce a location fix and eliminate the inaccuracy of the quartz-clock, data is required from a minimum of four satellites in view.
The effects of lower gravity and speed
Firstly, at their operational height above the earth, the satellites experience about a quarter of the gravity that is felt on earth.
According to general relativity (GR), due to the gravitational difference, the atomic clocks on the satellites run slightly faster than clocks on the earth by about 45.8 microseconds in a day.
Secondly, the satellites are racing around the earth at a speed of 14,000 Kph and special relativity (SR), indicates that the clocks will run slower by 7.2 microseconds each day compared to earth-bound clocks.
The net result is that the satellite clocks run faster by 45.8 – 7.2 micro-seconds per day.
Running faster by 38.6 millionths of a second in a day doesn’t sound like a lot, but to get accurate GPS fixes, it is essential that time from the satellites can be compared to earth-time with great precision to determine an accurate time-of-flight.
If the satellite clocks were never corrected....
Clocks running faster on the satellites, if not corrected, would gradually induce errors in estimated location that start to grow very swiftly over time.
In fact, without frequent corrections to the satellite clocks, the positional errors will accumulate by about 11 Kilometres each day!
So, within a matter of minutes, without any corrections, errors would start to appear in where a GPS device thinks it is.
How does GPS work out your location?
To determine location, your GPS receiver must calculate the distance from itself to each satellite in view and a minimum of four satellites is required to calculate location and local clock error.
A Cartesian system is used based on the centre of the earth being the origin or (0,0,0).
The GPS device then needs to work out the co-ordinates of each satellite referenced from the centre of the earth as origin.
Distance to each satellite
Your GPS device is constantly receiving messages from satellites in view. Satellite identity and the time that each message was sent are coded into the signal received by your GPS device.
The receiver can calculate the time of flight of the signal from any satellite from;
Time-of-Flight = Time-Received – Time-Sent.
Using the velocity of light and time-of-flight, the pseudo-distance to each satellite can be calculated from: c = pseudo-distance/time-of-flight giving;
Pseudo-Distance-to-Satellite = c x Time-of-Flight
For this to work, the earth and each satellite's clock must be precisely synchronised at all times. The satellite clocks are kept accurate by ground stations, but the GPS device must work out the value of ΔT and use it to correct the quartz-clock.
Location of each Satellite
Each satellite also broadcasts in its message, details about where it is in its current orbit and the GPS device can determine from this and on-board local data, the co-ordinates of the satellite with reference to the centre of the earth.
So, the GPS device must perform orbital calculations to determine the cartesian co-ordinates of the satellite when it broadcast its message.
A Special form of Triangulation of Satellites in View
To achieve an accuracy of 15 metres, time must be known to an accuracy of 49.5 billionths of a second, which is the time it would take light to cover 15 metres!
Once this special type of triangulation, known as trilateration, has been determined, your GPS device 'knows' where you are.
Technically speaking, triangulation uses angles from receiver to transmitters, GPS actually uses trilateration, based on distances to satellites rather than angles.
Conceptually, this method involves constructing pseudo-distance spheres from each satellite's cartesian co-ordinates and where they intersect defines location on the earth.
This is depicted in the following diagrams, where d(1) is the distance to satellite 1, d(2) to the second satellite, d(3) and d(4) are the distances to the third and fourth satellites.
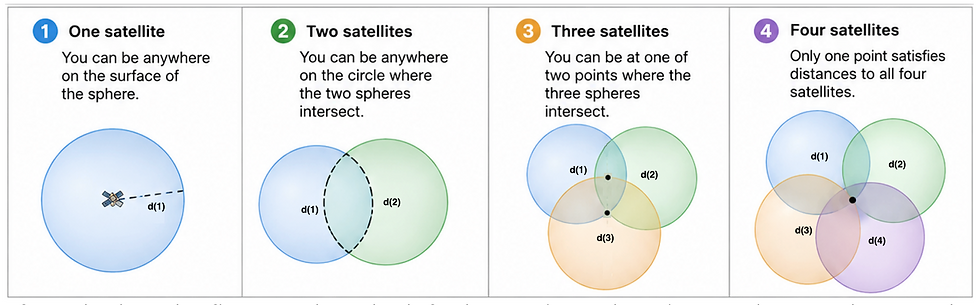
If you look at the first panel on the left, the receiver's location can be anywhere on the 3D sphere of radius d(1).
With two satellites, the receiver can be at any location where the two spheres intersect, which is still very vague.
The spheres created from three satellites reduces the uncertainty to just two points where all three spheres meet. One point is on the earth's surface and the second is out in space. So three satellites will provide positional information, but not eliminate the uncertainty in GPS device time, ΔT.
A fourth satellite is required to correct the receiver's clock error and obtain an accurate location.
Any residual mismatch between receiver time and GPS time is solved for mathematically during the position calculations.
From Distance Spheres to Latitude, Longitude and Height
The GPS software on your device first establishes the cartesian co-ordinates of each satellite to determine the co-ordinates of your location on the earth.
From orbital information and time-of-flight data, the following information is determined for four satellites in view by the GPS device;
Satellite 1's position = x1,y1,z1 and pseudo distance = d1
Satellite 2's position = x2,y2,z2 and pseudo distance = d2
Satellite 3's position = x3,y3,z3 and pseudo distance = d3
Satellite 4's position = x4,y4,z4 and pseudo distance = d4
The distances derived from signal time-of-flight calculations, initially contain a common error due to the receiver clock-offset and so are referred to as pseudo-distances.
From the above data, four simultaneous equations can be defined for the point at which all four pseudo-distance spheres meet as well as incorporating ΔT.
Solving the four equations simultaneously allows the receiver to determine both its position and its clock error.
Using standard co-ordinate geometry, the four simultaneous equations are;
(d1-cΔT)² =(x0-x1)² +(y0-y1)² +(z0-z1)²
(d2-cΔT)² =(x0-x2)² +(y0-y2)² +(z0-z2)²
(d3-cΔT)² =(x0-x3)² +(y0-y3)² +(z0-z3)²
(d4-cΔT)² =(x0-x4)² +(y0-y4)² +(z0-z4)²
Where;
dn is the pseudo-distance, or measured distance to a satellite for n=1 to 4.
cΔT is the unknown error in distance due to the local quartz-clock error.
x0,y0,z0 is the GPS device's unknown location in Cartesian co-ordinates.
xn,yn,zn are the calculated co-ordinates of each satellite for n=1 to 4.
Solving these four simultaneous equations yields, x0,y0,z0 and ΔT, which is then used to correct the local clock on the GPS device to synchronise it with standard GPS time.
Without going into detail, the longitude, latitude and height of the receiver's position can be easily calculated from x0,y0,z0 and the fact that the earth is not a perfect sphere is also taken into account.
GPS devices are constantly creating and solving the four simultaneous equations in fractions of a second continuously, until you reach your destination!
Just 4 Satellites
Four satellites provide enough information to create the four simultaneous equations necessary to solve current location and correct the local clock-error.
Although only four satellites are required mathematically, modern GPS receivers usually track many more. The receiver selects satellites that provide the best geometric coverage of the sky and then uses all available measurements to calculate the most accurate position.
Consequently, GPS devices do not normally rely solely on the four strongest signals.
Updating the Satellites Atomic clocks
Without time corrections applied to the satellites' clocks, the relativistic offsets in time (38.6 millions of a second) are so large in comparison to 49.5 billionths of a second (time taken for light to travel 15 metres), that in just minutes, the calculated positions would be kilometres out and become increasingly worse.
The clocks on the satellites are updated several times a day from ground stations and 'intelligence' built into the software on both satellite transmitters in space and receivers on earth, compensate for relativistic effects in between the uploaded corrections.
Key Takeaways
GPS devices rely on satellite messages being continuously received, containing time-message-sent and identity of satellite as well as details about current orbital position.
GPS devices constantly calculate pseudo-distance to a minimum of four satellites in view as well as the Cartesian co-ordinates of each satellite from orbital data supplied by each satellite.
From four such satellites, four simultaneous equations are created representing where the four pseudo-distance spheres meet. Each equation contains the x, y and z coordinates of the receiver and cΔT, representing the time-of-flight distance error.
The four equations are solved to provide the co-ordinates (x,y,z) of the GPS device's current position. This is then translated into latitude, longitude and height and a map location presented to the user.
The time on the GPS device is automatically synchronised with the GPS system time used on the satellites by constantly solving for ΔT and using it to correct the quartz-clock.
The time on the satellites' atomic clocks is updated several times daily to keep them in-line with earth-time and software corrections ensure that they stay in-time between updates.
Without special and general relativity, we would not have a viable GPS system, which can be reduced further to, without Albert Einstein, we would not have a viable GPS system.
© 2026 Kieron Conway - All rights reserved.
--
Liked this article? Check out:
where you can read all about an exciting new science series: A Journey into Modern Physics, available in three parts, from Amazon on-line shops. (Some of the above article may appear in this series).
Also, the web-site has an index of blog articles published to date, for easy access to an article that might interest you. You can access the index using the link above.
----



Comments